Pamplemousses
Modélisation 3D
Choix du logiciel
La modélisation 3d peut se faire sur divers logiciels numériques de traitement photogrammétrique. On peut retrouver notamment Agisoft Metashape (anciennement Photoscan), Autodesk Recap, 3DF Zephyr, PhotoModeler, Pix4Dmapper et RealityCapture parmi les plus connus.
J’ai opté pour Agisoft Metashape pour modéliser le projet, car c’est un logiciel autonome qui fonctionne hors ligne, avec une interface simple et un processus très linéaire qui facilite l’avancée entre chaque étape. Il peut traiter des images aériennes, à courte portée, UAS et imagerie satellitaire. Toutefois, il requiert beaucoup de puissance informatique pour les calculs.
Metashape génère des données spatiales 3D à utiliser dans les applications SIG, la documentation du patrimoine culturel et la production d’effets visuels ainsi que pour les mesures indirectes d’objets de différentes échelles.
Le logiciel permet de traiter les images de caméras par RGB, thermiques ou multispectrales, y compris les systèmes multi-caméras, dans les informations spatiales sous la forme de nuages de points denses, de modèles polygonaux texturés, des orthomosaïques géoréférencées et de DSMs/DTMs.
Un post-traitement supplémentaire permet d’éliminer les ombres et les artefacts de texture des modèles, de calculer les indices de végétation et d’extraire des informations pour les cartes d’action des équipements agricoles, de classer automatiquement les nuages de points denses, etc.
Metashape est capable de traiter plus de 50000 photos sur un cluster local, grâce à la fonctionnalité de traitement distribué. Alternativement, le projet peut être envoyé dans le cloud pour minimiser l’investissement matériel, toutes les options de traitement étant toujours disponibles.
‘Structure from Motion’
Le logiciel de photogrammétrie utilise la méthode Structure from Motion (SfM). L’approche SfM détermine simultanément la façon dont la lumière passe à travers le système optique de l’appareil photo (l’étalonnage de l’appareil photo) et la position et l’orientation (pose) de l’appareil photo, par rapport au sujet de l’image, pour chaque photo.
Lors du traitement, l’étalonnage et la pose de chaque caméra sont de plus en plus précis grâce à un processus itératif. Cela se fait en affinant de manière itérative un nuage clairsemé (eng. sparse cloud) de points dans la scène virtuelle représentant l’environnement du monde réel contenant le sujet d’imagerie.
Les points dans le nuage clairsemé sont créés à partir des correspondances de voisinages de pixels similaires identifiés dans plusieurs photos. Si des voisinages de pixels correspondants sont trouvés dans deux photos, ou de préférence plus, les zones occupées par les voisinages de pixels dans les photos respectives sont projetées dans la scène 3D virtuelle.
Ces projections se croisent sous la forme d’un volume commun dans la scène 3D et sont représentées comme un point dans le nuage clairsemé. L’incertitude de position (précision) de ces points est réduite. Au fur et à mesure que les précisions des positions des points augmentent, les précisions de l’étalonnage et de la pose de la caméra augmentent également.
Lorsque l’étalonnage et la pose de la caméra souhaités sont au niveau de précision acceptable pour l’utilisateur, le processus SfM est terminé. Agisoft Metashape et d’autres logiciels offrant la SfM utilisent ensuite une variété ou une autre d’algorithmes stéréo multi-points de vue pour construire un nuage de points dense, qui peut être transformé en un modèle 3D texturé.
Méthodologie

Logo "Agisoft Metashape"
https://www.agisoft.com/
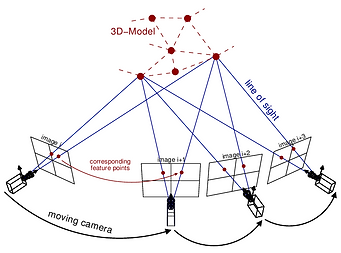
"Figure 4- uploaded by Sjoerd van Riel Structure from Motion (SfM) photogrammetric principle. Source: Theia-sfm.org (2016)
https://www.researchgate.net/figure/Structure-from-Motion-SfM-photogrammetric-principle-Source-Theia-sfmorg-2016_fig3_303824023
